
A síkos útra figyelmeztető hópehely szimbólum évek óta sok autóban megtalálható. Rendszerint akkor gyullad ki, ha a hűtő elé szerelt hőmérő 3-5°C-nál hidegebb levegőt érzékel. Ekkor ugyanis elképzelhető, hogy az út felszíne ennél is alacsonyabb hőmérsékletű és helyenként jegesedhet. De az sem kizárt, hogy pár perce még sütött a nap, a porszáraz aszfalt pedig legalább tíz fokkal melegebb, így fölösleges a figyelmeztetés.
Ennek eldöntésére egy második, infravörös szenzorral közvetlenül az útfelszín hőmérsékletét mérik, a két hőmérő jelét összevetve pedig már elvégezhető bizonyos fokú hihetőségvizsgálat is. Ezzel a primitív szenzorfúzióval már viszonylag nagy biztonsággal megállapíthatjuk, hogy tél van.

Nem mintha télen nem lehetne gyorsan menni. Egészen addig, amíg tényleg jegesedni nem kezd az út. Ennek eldöntésére egy optikai szenzor figyeli közvetlenül a kerék előtt (0,4–1,5 méter távolságban) az utat, és a visszavert fény erősségének változásából próbálja megsaccolni: nedves vagy jeges-e a felület. Ezzel párhuzamosan egy kissé távolabbra tekintő (5–20 méter) kamera figyeli az útról visszavert fény vízszintes és függőleges polarizációjának változásait, szintén a nedves foltok után kutatva. Legmesszebbre, az autó előtt 50–100 méterre pedig egy lézerszkenner sasol, hópelyheket vagy esőcseppeket keresve a levegőben.
Az optikai és a hőmérőszenzorok fúziójával már tényleg előre megmondhatjuk, hogy csúszik-e az út. Az igazán jó vezetéstámogató rendszer azonban mindaddig észrevétlen marad, amíg valóban szükség nincs rá. Fölösleges lenne a rettentő óvatosan, araszolva közlekedő sofőrt pittyegéssel, villogással és bimbammolással tovább stresszelni. Ehelyett akkor kéne jelezni, ha az adott útviszonyokhoz megválasztott sebesség, illetve járműdinamika mellett a tapadási határ közelébe érünk.

Ennek érdekében egy másik szenzorcsoport, a járműdinamikai szenzorok is beszállnak a fúzióba. Az ESP működéséhez amúgy is nélkülözhetetlen hossz- és keresztirányú gyorsulásérzékelők, a perdületérzékelő, az ABS kerékfordulatszám-jeladói és a kormányelfordulás-érzékelő jeleit feldolgozva összeáll egy matematikai modell, ami a jármű mozgását az adott körülmények között, ideális tapadású úton leírja. Ezzel párhuzamosan ugyanezekkel a szenzorokkal mérik az autó pillanatnyi viselkedését, és ha az ideális modell és a valós helyzet közötti eltérés egy bizonyos határértéket meghalad, kijelenthetjük: az autó megcsúszott, azaz nem úgy és arra megy, ahogy száraz úton tenné.
Az ESP vezérlő működése egyébként ugyanezen az elven alapszik, de csak akkor kell beavatkoznia, ha az autó egyértelműen, durván letér a kívánt pályáról. A vezetőnek szóló figyelmeztetés ezzel szemben már minimális csúszás esetén is indokolt: vigyázat, csúszáshatáron autózol!
A görbe jóindulatú
A kerék és az aszfalt közötti kölcsönhatás meglepően összetett jelenség, amire nem alkalmazhatóak egy az egyben a klasszikus fizika olyan kijelentései, mint a felület nagyságától független tapadási erő, vagy a csúszási súrlódási együtthatónál nagyobb tapadási súrlódási együttható. Ennek oka egyrészt az anyag viszkoelasztikus tulajdonsága, másrészt a gumi profilja, ahol a számtalan apró lamella éle külön-külön kapaszkodik az aszfalt egyenetlenségeibe.
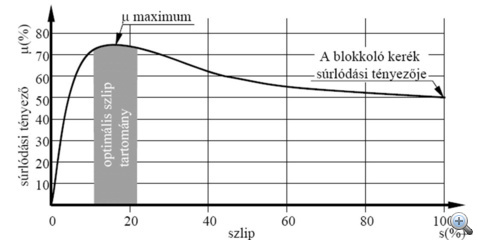
A mérések alapján 10–15 százalékos csúszás (szlip) mellett maximális a tapadási erő. Nem igaz tehát a közkeletű vélekedés sem, hogy határhelyzetben a tapadás hirtelen, minden előzmény nélkül tűnik el: a görbe jóindulatú, emelkedő ágán stabil a rendszer akkor is, ha kicsit csúszik a kerék. Ez pedig pont elég lehet egy jól átgondolt vezetéstámogató rendszernek arra, hogy az előtt jelezzen, mielőtt a sofőr elveszti az uralmát a jármű felett.
A csúszáshatár felismerésének másik módszere a kormányerő figyelése. Az elektromos rásegítésű szervóknál ez szinte gyerekjáték: mindössze a sebességfüggő határértékeket kell pontosan belőni, amelynél kisebb kormányerőnél a rendszer jeges útra vagy aquaplaningre gyanakszik.

A vízenfutás felismerését további szenzorokkal is támogathatják, így például a kerékben elhelyezett érzékelőkkel a gumi deformációjának változásából következtethet a rendszer az aquaplaningre.
Végeredményben tucatnyi, jórészt már amúgy is meglevő szenzor jelének intelligens feldolgozásával előállítható olyan vezetéstámogató rendszer, ami az aktuális járműdinamika és az útviszonyok figyelembevételével megbízhatóan, időben jelzi a sofőrnek, ha a kerekek igénybevétele a tapadási határhoz közelít. Egy, az EU által támogatott kutatási projekt keretében a Continental által felépített kísérleti autóban mindez már ma is működik, és tulajdonképpen csak szoftver kérdése, hogy a közeljövőben szériaautókban lássuk viszont.
Egyetért? Vitatkozna vele? Véleményét elmondaná másoknak is?
Tegye meg a publikáció blogposztján!



