Sokan, sokféleképp póbálták már megkönnyíteni az autósok életét. Praktikus térképszoftverek, intelligens fedélzeti számítógépek veszik le a vezetés terhének egy részét a fáradt autósról. Az úttartó rendszerek a sofőr nélküli vezetés álmát valósítják meg. Működésükhöz azonban sok külső tényezőnek kell ideálisnak lenni. Ráadásul gyakran az úthálózat is átépítésre szorul.
Megszületett egy neurális hálózati modell (egyelőre kidolgozás alatt áll), amely a fent vázolt ideális körülmények hiányában is képes automatikus irányításra. Az ALVINN (Autonomous Land Vehicle In a Neutral Network) olyan kiegészítő rendszer, amely segít felügyelni és korrigálni a vezetést. Többrétegű ellenőrzési és végrehajtási szinten keresztül éri el a hatást.
|
|
|
|
|
|
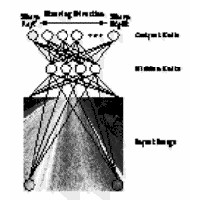
A hálózat bemeneti szintje egy 30x32 egységnyi
két dimenziós ,,retina" (
nagyon gyors képfelismerő rendszer), amely bejövő adatait a
jármű kameráitól kapja. Minden egyes inputegység jele teljes
kapcsolatban áll öt másik rejtett réteggel, ezeken keresztül pedig
a 30 egységnyi végrehajtóréteggel.
A kimeneti egység megmutatja, merre kell a járműnek haladnia, hogy ne térjen le az útról. (Ez tulajdonképpen egy szenzorokból és rendkívül nagy teljesítményű számítógépprogramból álló szisztéma, amely ezredmásodperc alatt képes egy 1024 pixel dimenziójú képet értelmezni.)
|
|
|

|
|
A forgalomban vezetve a fedélzeti kamerából
származó videokép a bemenő egységbe jut. A jel a hálózaton
keresztül kerül feldolgozásra, és az irányító utasításokat a
végrehajtó rétegek generálják. A legaktívabb
végrehajtó réteg-egység határozza meg a fő irányt. (Sok lúd
disznót győz-alapon.)
Hogy gyakorlatban is megtanítsák a szoftvert vezetni, az ALVINN videoképeket mutat a fedélzeti kameráról, ahogyan a sofőr vezet, és javaslatot tesz, hogyan lehetne korrigálni a fő irányt. A pozitív visszacsatolás elvét alkalmazva a vezetői technika kb. 3 perces vizsgálódása után a rendszer képes átvenni a teljes irányítást, és folytatni a vezetést immár önállóan, amíg újabb életszerű szituációs problémával nem találkozik. (Ebből következik, hogy egyelőre a sofőrnek készen kell állnia a vezetésre, hiszen ô ,,vezeti fel" a rendszert.)
Mivel képes megtanulni, hogy az éppen adott képnek melyek a legfontosabb részei és tartalmi elemei a vezetési helyzetekben (tökéletes képfeldolgozás és felismerés), az ALVINN képessé vált, hogy szélsőséges körülmények között vezessen, míg bármely más önálló navigációs rendszernek szüksége van fix támpontokra az úton (pl. záróvonal) a pontos iránytartáshoz.
|
|
|
|
|
|
Az ALVINN alkalmas egysávos földúton, egysávos
betonozott kerékpárösvényen, kétsávos utakon és autópályákon való
vezetésre is. A teszteken
sikeresen vezetett 110 km/h-s sebességgel több mint 140 km-t
a pittsburghi autópályán, forgalomban. (Ez volt az első próbálkozás
az elmélet gyakorlati síkra ültetésére.)
A speciális hálózatokat megtanították, minden egyéb, még be nem táplált, tehát számukra új típusú úton való vezetésre is, illetve annak elsajátítási technológiájára. Sőt, miközben vezet, nem csak az éppen aktuális útra, hanem annak változásaira is képes figyelni és memorizálni is.



