







A teljes városi önvezetésre még várni kell. A tévénézésben egyelőre csak álló helyzetben lehet elmerülni
Fotó:
systemplus
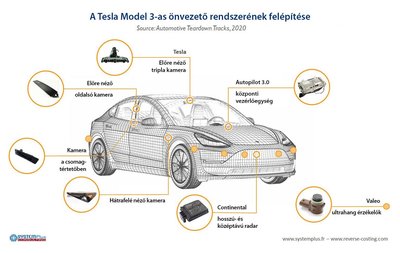
A Tesla Model 3-as érzékelő rendszere. Hangsúlyos a kamerák használata
Fotó:
systemplus
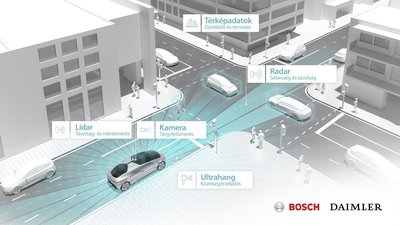
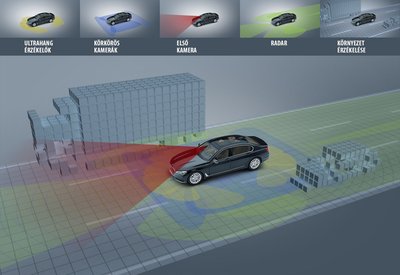
Minden rendszernek megvan a maga hatásköre és feladata. Egymást kiegészítve képesek annyi információt szállítani, amiből a központi számítógép képes értékelni a helyzetet
Fotó:
systemplus
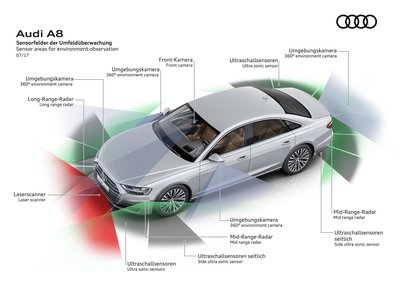
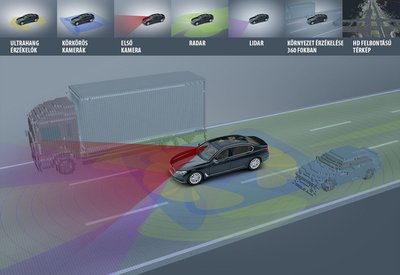
Az Audi A8-as teljes érzékelőrendszere szinte minden megoldást felvonultat
Fotó:
systemplus
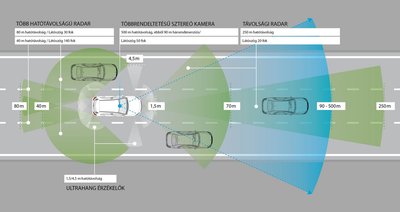
Ennyi radarra van szükség az autó környezetének feltérképezéséhez. Így viszonylag pontos képet képes alkotni a rendszer
Fotó:
systemplus
Kamera és lidar rendszer egy kísérleti autó tetején
Fotó:
systemplus
Három, különböző fókusztávolságú kamera néz előrefelé a szélvédő mögül a Tesla Model 3-ban (a negyedik csak ráadás)
Fotó:
systemplus
Sűrű esőben, ködben a kamerarendszerek képességei erősen korlátozottak
Fotó:
systemplus
Nemcsak a pillanatnyi helyzetet, de a szándékokat is fel kellene ismernie az önvezető rendszereknek ahhoz, hogy biztosan elkerüljék a baleseteket
Fotó:
systemplus
Kell egy kis számítási kapacitás a beérkező információk feldolgozásához a kísérleti járművekben
Fotó:
systemplus
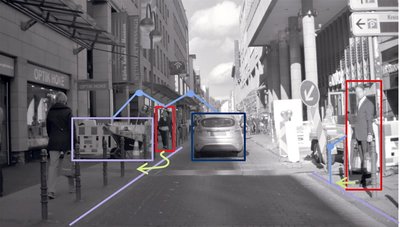
A valóság, és ahogy az önvezető rendszer látja
Fotó:
systemplus
Körülbelül ilyennek látja a környezetében lévő járműveket a durvább felbontásra képes, radarokon alapuló rendszer
Fotó:
systemplus
Lidar bevetésével sokkal finomabb felbontásúvá válik a kép
Fotó:
systemplus
Körkörösen pásztázza a környezetét a lidar. Közben körülbelül ilyen képet alkot, és mindennek megméri a pontos távolságát
Fotó:
systemplus
A lidart a kísérlethez használt autók tetejére telepítik általában. Szériaautónál ez szóba sem jöhet
Fotó:
systemplus
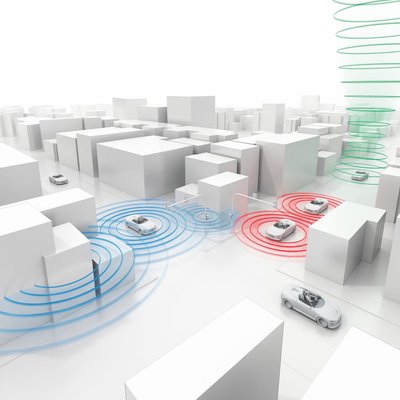
Autó-felhő kapcsolattal olyan járművek is információt szerezhetnek egymás mozgásáról, vagy a velük történt eseményekről, amelyek nem is látják egymást
Fotó:
systemplus