


Úgy gondolom, hogy ez év végén, de legkésőbb a jövő évben eljutunk oda, hogy az emberi közbeavatkozás inkább ront majd a biztonságon - jelentette ki Elon Musk egy még 2019 áprilisában adott interjúja során. Tudjuk róla, hogy szeret magabiztosan nagyokat mondani, de kevesen gondolták volna, hogy az élet úgy cáfol rá a kijelentésére, ahogy az a valóságban megtörtént. Közel négymillióan látták már azt a videót, amin egy önvezető programot (Autopilot) használó Tesla Model 3-as lassítás nélkül rohan bele az autópályán heverő, felborult teherautóba. Nem egy hirtelen lefékezőbe, nem egy hídról hirtelen elé zuhanóba, percek óta stabilan az úttesten hevert.
A videó alapján egyértelmű, hogy ez éppen egy olyan eset, ahol az emberi közbeavatkozás nem rontott, hanem éppen javított volna a biztonságon. Egy éber sofőr már régen vagy sávot váltott volna (mint tette mindenki más), vagy a fékre lépett volna. Úgy meg különösen, hogy a teherautó sofőrje a saját életét kockáztatva próbálta meg felhívni a veszélyre a közeledő járművek, köztük a Tesla Model 3-as figyelmét. De ne legyünk teljesen igazságtalanok Elon Muskkal szemben, kijelentésével nyilván nem a már régebb óta az utakat járó Teslákra gondolt, hanem azokra, amelyek a 2020-tól készülőkre. Közöttük például a Model Y-ra és a nemrég modellfrissítésen átesett Model S-re és Model 3-asra.
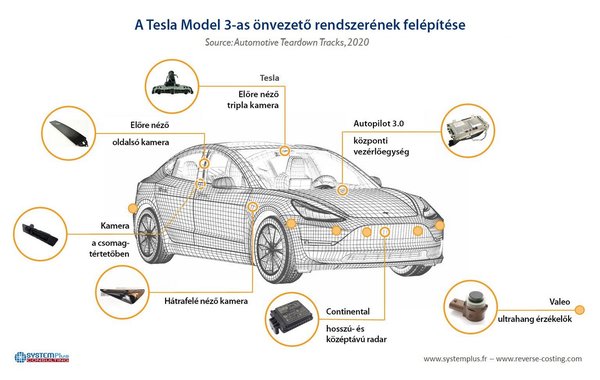
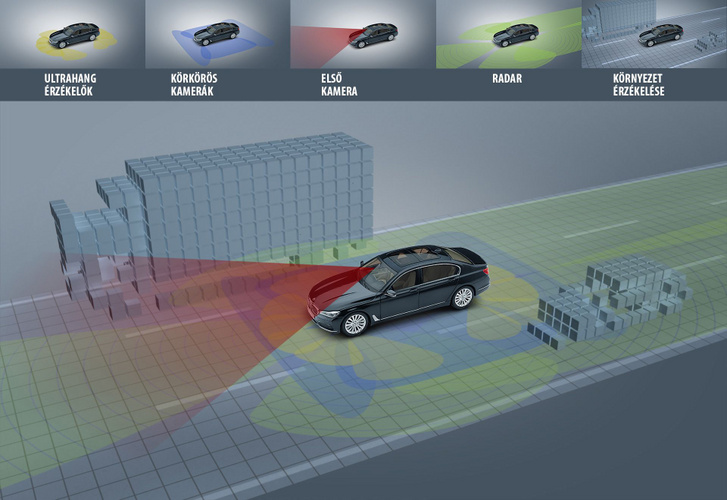
Ezzel együtt már a balesetet elszenvedő, modellfrissítés előtti Model 3-as önvezető rendszere is figyelemre méltó baleset-elkerülő arzenált vonultatott fel. Összesen nyolc kamerát, két radart és tizenkét ultrahangos radart. Az utóbbiaknak persze nem sok közük lehetett a történtekhez, hiszen hatótávolságuk alig nyolc méter. Feladatuk így az autó közvetlen környezetének feltérképezése és a parkolás megkönnyítése. A kamerák közül három azonban konkrétan előre néz, és a radarok is az autó előtti teret pásztázzák. Hogyan eshetett mégis meg az, ami megesett?

Érdemes először áttekinteni, hányféle érzékelőt alkalmaznak a vezetést támogató és önvezető rendszereikhez. A legegyszerűbb és nagyon sok autóban megtalálható, sőt, utólag is viszonylag egyszerűen beépíthető a már említett ultrahangos érzékelő. Működése azon alapul, hogy az emberi fül által már nem hallható frekvenciájú (30-300 kHz, azaz másodpercenként harminc- és háromszáz-ezer közötti rezgésszámú) hanghullámokat bocsát ki, amelyek az akadályokról visszaverődnek, amit az érzékelő felfog.
A (hang)hullámok terjedési sebessége átlagos körülmények között 330 m/s (kb. 1200 km/h), a kibocsátás és a visszaérkezés között eltelt időből (és a hang sebességéből) az akadály távolsága egyszerűen kiszámítható, ez például a tengeralattjárókat kereső szonár elve is. Parkolóradaroknál a hajszálpontos adat kijelzésére nincs szükség, elegendő, hogy a hang erősödése érzékelteti a közeledést. A többi érzékelőhöz képest a hanghullám eléggé lassú, de arra alkalmas, hogy az autó 5-8 méteres környezetét kellő pontossággal felmérje. Ennek megfelelően parkolóradarokhoz és holttér-figyelő rendszerekhez jól alkalmazható. Előnye, hogy működését a fény- és időjárási körülmények kevéssé befolyásolják. Világosban és sötétben, esőben és ködben is képes feladatát ellátni.
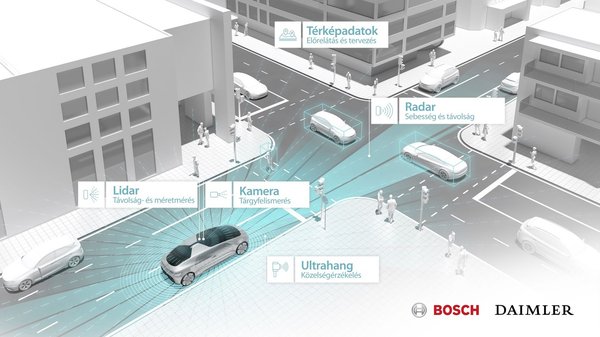
A radarok működése nagyon hasonló, csak nem lassú hanghullámokkal, hanem a fény sebességével (másodpercenként 300 000 kilométer) terjedő (elektromágneses) rádióhullámokkal tapogatják a környezetet. Földi viszonylatban hatótávolságuk akár több száz kilométer is lehet, amit első éles bevetésükön is bizonyítottak, amikor a London felé tartó német bombázók közeledéséről adtak hírt. Autós alkalmazásban ekkora hatótávolságra nincs szükség, általában még a hosszú hatótávolságúak sem látnak tovább 250-300 méternél.
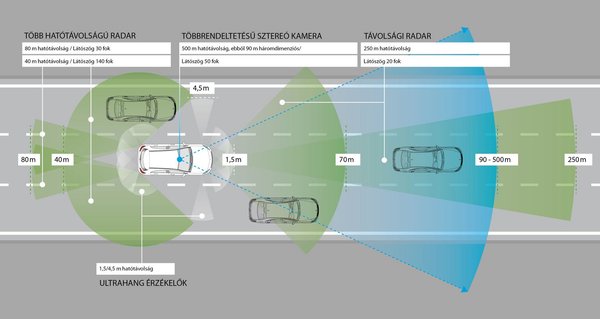
A legújabb autókba beépített radarok többsége 77 GHz frekvencián működik, ennek megfelelően nagy távolságon is alkalmas pontos letapogatásra és a távolság pontos megmérésére. Ennek ellenére általában két, vagy három fokozatra szokták osztani a radarokat és az autó előtti teret. A nagy hatótávolságúak 250-300 méterre látnak, de csak szűk, 20-30 fok közötti szögben. A közepesek 60-80 méterre pásztáznak, de 60 fokos szög alatt, míg a rövidek csupán 25-35 méterre tekintenek előre, viszont már 80-90 fokban. Utóbbiak így pontos információkat képesek adni a közvetlen közelünkben, a mellettünk levő sávokban előttünk mozgó járművekről.
A radarok nagy előnye a pontos távolságmérés, és az, hogy kevésbé érzékenyek az időjárásra, Sötétség, eső, köd nem zavarja őket, gondoljunk arra, hogy ködben a hajók és a repülőgépek is elsősorban a radarjaik jeleire támaszkodva tájékozódnak. Hátrányuk viszont, hogy nem képesek egészen pontos és részletes képet adni a környezetről. Nem tudnak például egy motorost egy kerékpárostól megkülönböztetni, leolvasni egy közlekedési táblát, vagy felismerni a felfestéseket az úttesten. Erre valók a kamerák.
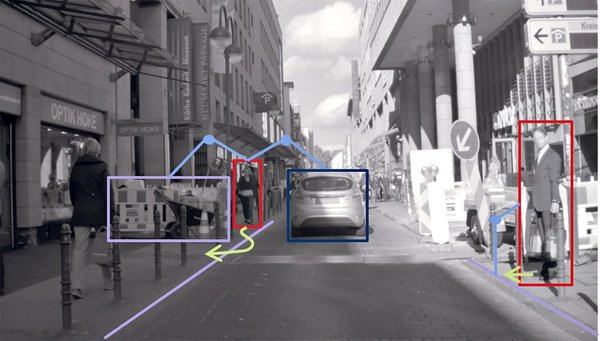
Igen, a kamerák, amelyekkel az emberi szemet próbálják pótolni. Ennek megfelelően valóban képesek észlelni az út felfestéseit, a táblákat, felismerni és azonosítani nemcsak a kerékpárosokat és motorosokat, de a gyalogosokat és az úttestre esetleg rátévedő állatokat is. Sőt, még a távolság mérésére is alkalmasak, méghozzá több módon. Az egyik az emberi szemhez hasonló módszer, amikor két kamerát építenek be egymás mellé a szélvédő felső éle alá, és a sztereó kamera által látott különböző kép eltéréseiből számolja ki a program az egyes tárgyak távolságát. A megoldás hátránya, hogy drágább, mint az egykamerás rendszer, és a távolságmérést a radar is képes megoldani. A másik módszer, amit a Tesla is alkalmaz, hogy a perspektívából következtet az algoritmus a távolságra, de ne felejtsük el, a Tesla is használ radart.

A kamerarendszerek hátránya viszont, hogy érzékenyek az időjárásra. Ködben ugyanúgy nem látnak jól, mint az emberi szem, de az eső is nagyban megnehezíti az érzékelésüket. Vizes úton nem képesek megbízhatóan azonosítani a felfestéseket és a visszatükröződések is okozhatnak zavart. Gondoljunk csak arra, hogy sötétben nemcsak a szembejövő autó fényszóróit észleli a kamera, hanem a fényszórók aszfaltról visszatükröző képét is. A pocsolyák csak tetézhetik a bajt. Ahol van, ott felvillan, ahol nincs, ott elsötétül a visszatükröződés.
További gond, hogy a kamerák többnyire a kontrasztot (vagyis a fény és árnyék különbségét) érzékelik. Így például kiválóan látják a sebességkorlátozó táblán a számokat, vagy sötét aszfalton a fehér felfestéseket. Problémát jelenthet viszont nekik például az út szélének a felismerése, ha az nincs jelölve. Ekkor a szürke aszfaltot kellene megkülönböztetniük a szintén szürke, kavicsos, poros útpadkától. Ez egyelőre még kevés kamerarendszernek sikerül megbízhatóan, holott például erre lenne szükség, hogy az önvezető autók a felfestés nélküli országutakon is elboldoguljanak. (Elméleti szinten a rendszernek azt kellene megoldania, hogy érzékeli az úttest két szélét, a távolságot megfelezi, majd a baloldali, saját sáv közepén tartja az autót.)

Hasonló jellegű probléma, hogy a kamerarendszerek csak azt képesek látni és értékelni, amit megtanítanak nekik. A gyalogosokat például éppúgy a lábmozgásról azonosítják legbiztosabban, mint a kerékpárosoknál is a jellegzetes, fel-le lábmozgást szúrják ki. De az állatoknál minden egyes eltérő alakot (vaddisznó, őz, jávorszarvas, stb.) külön meg kell tanítani nekik.
A jelenleg elfogadott nézet szerint ezért a kamerák és a radarok hiányosságai miatt csak a kettejük kombinációja vezethet eredményre. A Tesla Model 3-ban azonban volt ez is, az is, a nyolc kamerájából három - különböző fókusztávolságú - meredt előre, a nap is sütött, mégis kamikaze módra telibe találta az úton fekvő teherautót. Egyik kamera sem látott semmit, vagy a radar mondta fel a szolgálatot?
Bár tudtommal az esetet a mai napig nem tisztázták hivatalosan, a hiba legvalószínűbben olyan jellegű lehetett, mint ami közel negyven éve a brit Sheffield romboló vesztéhez vezetett. A Falklandi háború során őfelsége szupermodern technikával felvértezett hajójának érzékelő rendszere (radarjai) tökéletesen érzékelték a közeledő ellenséges repülőgépről indított rakétát, csakhogy a radarok számítógépeit úgy programozták, hogy csak a szovjet fegyvereket értékeljék ellenségesként. Az argentinok azonban Exocet rakétát indítottak a Sheffield ellen, ami francia gyártmány.

Ehhez hasonlóan, esetünkben is a Model 3-as rendszere valószínűleg érzékelte az úton felborult teherautót, viszont problémái támadtak a helyzet értékelésével. A Tesla Autopilot rendszere a kamerák képét tekinti elsődlegesnek, és a kamera mit látott? Egy álló teherautót valószínűleg azonosított volna, a felborultból azonban csak a ponyvája látszott. Gondot okozhatott ezen kívül a ponyva fehér színe, ami nem ütött el jelentősen az ég színétől, tehát nem volt jelentős kontraszt-különbség. A radar jelét pedig valószínűleg felülbírálta a rendszer. Rövidre vágva: a Tesla rendszere nem rakta össze, hogy mi is van valójában előtte.
Ez, és az ehhez hasonló esetek is rámutatnak, hogy a vezetéstámogató rendszerek és fejlettebb együttesük, az önvezető rendszer már számos feladatot képes megoldani, és sok baleset elkerülésében is képes segítséget nyújtani. Ezt videók is bizonyítják. Ezzel együtt nem képesek azonban még ma sem minden feladatot megoldani. A fejlesztő munka természetesen nem állt meg, erre utalt nyilatkozatával Elon Musk is.

Kérdés persze, hogy a szoftverek fejlesztésén kívül milyen lehetőségek vannak még nyitva. Sokan komoly reményeket fűznek egy további érzékelőhöz, amiről viszont szintén épp Elon Musk nyilatkozta, hogy az ára miatt nem hajlandó használni. A Tesla egyébként – amúgy hasonlóan a többi gyártóhoz – erősen próbálja lefelé nyomni a költségeket, hiszen például a HW 3.0-ás Autopilotjuk központi számítógépe 160 dollárral olcsóbb (795 helyett 635 dollár), mint az előző generációs HW 2.5-ös. Ebből 90 dollárt csak a processzorokon hoztak be. De az előre néző tripla kamerájukért is csupán 65 dollárt fizetnek, míg a német ZF a hasonló, a BMW-nek felajánlott rendszeréért 165 dollárnak megfelelő eurót kér el.
Egyes szakemberek szerint az igazi csodaeszköz a lidar (light detection and ranging, azaz fényérzékelő és távmérő) lenne, amely radar módjára, de lézerfénnyel térképezi fel a környezetét. Infravörös, láthatatlan lézert bocsát ki és a visszaverődő sugarakat értékeli. Nagyon gyors, nagyon pontos, és hihetetlenül részletgazdag képet képes alkotni. A mezőgazdaságban, repülőgépről alkalmazott lidar például nemcsak a rovarokat képes felismerni és azonosítani, de állítólag még azok nemét (!) is képes megállapítani. Autós vonatkozásban inkább arra hivatkoznak, hogy több száz méterről is képes kimutatni, hogy például egy motoroson van-e bukósisak, vagy nincs.
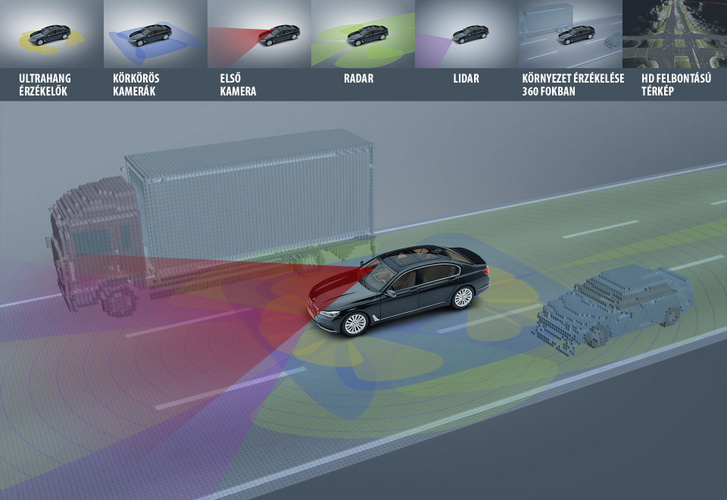
A megfelelően finom felbontású lidar tehát fényképszerű képet képes alkotni úgy, hogy eközben mindennek a hajszálpontos távolságát is képes megállapítani. Valószínűleg ezért is került bele a legújabb iPhone fényképező rendszerébe is. Pontossága miatt arra is alkalmas, hogy például az úton mozgó járművek sebességét is pontosan lekövesse. Ennek ellenére a lidar is csak radarral együtt alkot csapatot. Az ok ugyanaz, mint a kamera esetében. Mivel a lidar is fénnyel dolgozik, ezért érzékeny az időjárás viszontagságaira. Sűrű esőben és ködben a kamerához hasonlóan korlátozottan, vagy egyáltalán nem képes a feladatát ellátni. Ezzel együtt, előnyei miatt több, főként távol-keleti gyártó is fontolgatja felhasználását. Annak ellenére, hogy mások állítják, radarokkal és kamerákkal is ugyanolyan eredményesen lehet követni az autó körüli eseményeket – sokkal olcsóbban.
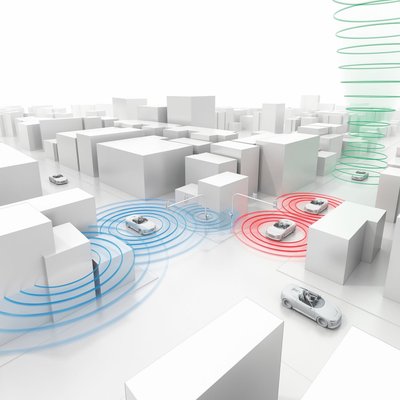
Még egy megoldás segíthetett volna a Model 3-asnak az ütközés elkerülésében, a felhő alapú információcsere. Amennyiben a teherautó és a Tesla is csatlakoztatva lett volna egy ilyen rendszerhez, akkor nem csupán az autó saját érzékelőinek kellett volna megbirkóznia a kihívással, hanem külső segítséget is kapott volna. A teherautó rendszere az internetes felhőbe továbbította volna a baleset tényét és pontos helyét, amit a Model 3-as rendszere könnyedén levehetett volna az internetről (hiszen minden Tesla be van kötve az internetre) és ennek megfelelően járhatott volna el, vagyis kikerülhette volna az akadályt.
A Teslánál és több más gyártónál azonban az önvezetést kizárólag egyedi módon próbálják megvalósítani, vagyis a vezetőt próbálják egy érzékelőket felhasználó robotrendszerrel kiváltani. Ez belátható helyzetekben működhet is, az egyenes úton felboruló teherautó esetében működnie is kellett volna. Az egyéni rendszerek azonban nem képesek például a beláthatatlan kanyar után lévő akadályokat (jegesedés, balesetet szenvedett autó, leszakad faág), vagy az egyenrangú útkereszteződéshez tőlünk balra eső utcából nagy sebességgel takarásból közeledő autót érzékelni. A felhő alapú rendszereken keresztül az ilyen jellegű információk a bajba került, vagy érintett járművektől eljuthatnak a közlekedés többi résztvevőjéhez, és így olyan veszélyes helyzetek és balesetek is elkerülhetővé válhatnak, amelyeket még az emberi sofőrök sem képesek megoldani. Ha azonban ez megvalósulna, akkor már valóban többet ártana, mint használna az emberi közbeavatkozás.








