

 Állítsd be, hogy a Totalcar az elsők között legyen a Google-találatokban!
Állítsd be, hogy a Totalcar az elsők között legyen a Google-találatokban!


A kanyar külső ívén árokba borult autók komoly jelzésértékkel bírnak, de talán előbb olyan dolgok jutnak az ember eszébe, hogy tél van meg havas/vizes az aszfalt, esetleg csak olyan furcsán csillog. E jelek alapján ha pontosan tudni nem is, sejteni mindenképp lehet, hogy csúszós szakasz következik és érdemes csökkenteni a sebességet.
A másik módszer a germán kultúrkörben popométernek nevezett eszköz, azaz a pilóta ülepe, amivel érzi, hogy csúszik az út.
De mégis honnan?
Onnan, hogy az autó nem úgy viselkedik, azaz nem pont úgy és nem pont arra megy, ahogy azt száraz úton megszoktuk. Gyorsításkor csöppet kipörög a kerék, kanyarban jobban tolja az orrát/farát, fékezéskor nehezebben lassul, tán kattan is egyet-kettőt az ABS. Ha nem vezetünk állat módjára, e finom jelekből is megérthetjük: csúszós az út, érdemes lassítani.
A tapadás romlásának van még egy csalhatatlan indikátora: a hirtelen gyanúsan lecsökkenő kormányerő. Különösen aquaplaning és tükörjég esetén jellemző, hogy hirtelen könnyűvé válik a kormányzás, miközben az autó arra megy, amerre akar (illetve amerre a fizika törvényei szerint mennie kell), ami nem feltétlenül esik egybe a kanyar ívével.
Pontosan megmondani tehát a tapasztalt pilóta sem tudja előre, hogy csúszik-e az út, legföljebb érzi, de akkor már gyakran késő.
Tapadást mérni nem kell félnetek

A tapadás meghatározása a reptéri kifutópályákon télen kiemelkedően fontos, napi rutinfeladat. A mérést egy utánfutóba vagy teherautóba integrált berendezés végzi, ami gyakorlatilag adott erővel a talajhoz szorított és meghatározott csúszással (szlippel) fékezett kerék. A kerékre ható erőket mérve kiszámolható a tapadási együttható. Egy másik módszer szerint a mérőkerék a haladási iránnyal bizonyos szöget (például húsz fokot) zár be, ami szintén folyamatos szlipet eredményez. A tapadási együttható itt is a kerékre ható erőkből számítható.

A közúti gyakorlatban az utánfutó talán praktikusnak tűnhet, de vegyük észre, hogy a mérési eredmény csak azután áll rendelkezésre, miután áthaladtunk a kritikus útszakaszon, azaz előre nem tudjuk megmondani, milyen lesz a tapadás a következő kanyarban.
Pedig milyen nagyszerű lenne, ha valahogy megjósolhatnánk, hogy az autó előtt 5-10-50 méterrel milyen tapadási viszonyok uralkodnak! Elsősorban elvehetnénk a gázt és finoman fékezni kezdhetnénk – ez a legjobb, amit tehetünk (igen, a hátulhajtós autó kivétel…). Aztán gyorsan átparaméterezhetnénk az ABS és az ESP szoftvereit, elővéve a rosszabb tapadásra optimalizált verziót. Vagy ott van napjaink slágere, a távolságtartó tempomat, ami bizonyára még nagyobb térközt hagyna havas úton, ugyanakkor örömmel csökkentené a követési távolságot a csontszáraz autópályán, ha tudná, hogy bőven be tud avatkozni, mert kiváló a tapadás. De gondolhatunk az ütközés következményeit csökkentő (pre-crash) rendszerekre is, melyek akkor lépnek működésbe, ha a vezetőnek már nincs esélye elkerülni a balesetet. Annak meghatározása, hogy hol az a pont, ahonnan már nincs visszaút, gyakorlatilag a sebességtől és a tapadási viszonyoktól függ. Utóbbi ismerete jelentősen javítaná a pre-crash rendszerek hatékonyságát is.
Egzakt mérési eredmények hiányában a mérnökök is csak a fent vázolt, bizonytalan, esetleges jelekből tudnak következtetni a tapadás mértékére. Az algoritmus tehát:
HA tél van ÉS/VAGY esik az eső/hó ÉS/VAGY csillog az aszfalt ÉS/VAGY furcsán mozog az autó ÉS/VAGY gyanúsan könnyű a kormány, AKKOR valószínűleg rossz a tapadás
Minél több feltétel teljesül egyidejűleg, annál valószínűbb, hogy tényleg érdemes lassítani. Az eltérő fizikai paramétereket mérő érzékelők jelének rendszerszintű kiértékelését és azokból messzemenő következtetések levonását a szakirodalom szenzorfúzió néven emlegeti.

Szenzorfúzió a gyakorlatban
Tegyük fel, hogy Béla kinyitja a hűtő ajtaját és megállapítja: valaminek büdös zokni szaga van. Egyetlen szenzorral (az orrával) minden bizonnyal arra a következtetésre jutna, hogy a hűtőben egy büdös zokni van. Ugyanakkor elindul egy hihetőségvizsgálati (plauzibilizálási) folyamat is az agyában: elképzelhető, hogy a hűtőben egy büdös zokni van? Nem kizárt, de nem is túl valószínű. Ezért más fizikai paramétereket mérő szenzorokkal (például a szemével vagy az ízlelőbimbóival) is megvizsgálja a problémát. A kapott információkat összevetve pedig megállapítja, hogy a hűtőben egy darab penészes francia sajt van.
De honnan tudja az autó, hogy csúszik-e az út? Lapozzon, kiderül!

A síkos útra figyelmeztető hópehely szimbólum évek óta sok autóban megtalálható. Rendszerint akkor gyullad ki, ha a hűtő elé szerelt hőmérő 3-5°C-nál hidegebb levegőt érzékel. Ekkor ugyanis elképzelhető, hogy az út felszíne ennél is alacsonyabb hőmérsékletű és helyenként jegesedhet. De az sem kizárt, hogy pár perce még sütött a nap, a porszáraz aszfalt pedig legalább tíz fokkal melegebb, így fölösleges a figyelmeztetés.
Ennek eldöntésére egy második, infravörös szenzorral közvetlenül az útfelszín hőmérsékletét mérik, a két hőmérő jelét összevetve pedig már elvégezhető bizonyos fokú hihetőségvizsgálat is. Ezzel a primitív szenzorfúzióval már viszonylag nagy biztonsággal megállapíthatjuk, hogy tél van.
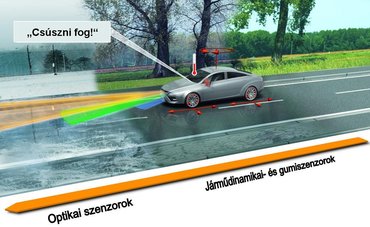
Nem mintha télen nem lehetne gyorsan menni. Egészen addig, amíg tényleg jegesedni nem kezd az út. Ennek eldöntésére egy optikai szenzor figyeli közvetlenül a kerék előtt (0,4–1,5 méter távolságban) az utat, és a visszavert fény erősségének változásából próbálja megsaccolni: nedves vagy jeges-e a felület. Ezzel párhuzamosan egy kissé távolabbra tekintő (5–20 méter) kamera figyeli az útról visszavert fény vízszintes és függőleges polarizációjának változásait, szintén a nedves foltok után kutatva. Legmesszebbre, az autó előtt 50–100 méterre pedig egy lézerszkenner sasol, hópelyheket vagy esőcseppeket keresve a levegőben.
Az optikai és a hőmérőszenzorok fúziójával már tényleg előre megmondhatjuk, hogy csúszik-e az út. Az igazán jó vezetéstámogató rendszer azonban mindaddig észrevétlen marad, amíg valóban szükség nincs rá. Fölösleges lenne a rettentő óvatosan, araszolva közlekedő sofőrt pittyegéssel, villogással és bimbammolással tovább stresszelni. Ehelyett akkor kéne jelezni, ha az adott útviszonyokhoz megválasztott sebesség, illetve járműdinamika mellett a tapadási határ közelébe érünk.

Ennek érdekében egy másik szenzorcsoport, a járműdinamikai szenzorok is beszállnak a fúzióba. Az ESP működéséhez amúgy is nélkülözhetetlen hossz- és keresztirányú gyorsulásérzékelők, a perdületérzékelő, az ABS kerékfordulatszám-jeladói és a kormányelfordulás-érzékelő jeleit feldolgozva összeáll egy matematikai modell, ami a jármű mozgását az adott körülmények között, ideális tapadású úton leírja. Ezzel párhuzamosan ugyanezekkel a szenzorokkal mérik az autó pillanatnyi viselkedését, és ha az ideális modell és a valós helyzet közötti eltérés egy bizonyos határértéket meghalad, kijelenthetjük: az autó megcsúszott, azaz nem úgy és arra megy, ahogy száraz úton tenné.
Az ESP vezérlő működése egyébként ugyanezen az elven alapszik, de csak akkor kell beavatkoznia, ha az autó egyértelműen, durván letér a kívánt pályáról. A vezetőnek szóló figyelmeztetés ezzel szemben már minimális csúszás esetén is indokolt: vigyázat, csúszáshatáron autózol!
A görbe jóindulatú
A kerék és az aszfalt közötti kölcsönhatás meglepően összetett jelenség, amire nem alkalmazhatóak egy az egyben a klasszikus fizika olyan kijelentései, mint a felület nagyságától független tapadási erő, vagy a csúszási súrlódási együtthatónál nagyobb tapadási súrlódási együttható. Ennek oka egyrészt az anyag viszkoelasztikus tulajdonsága, másrészt a gumi profilja, ahol a számtalan apró lamella éle külön-külön kapaszkodik az aszfalt egyenetlenségeibe.
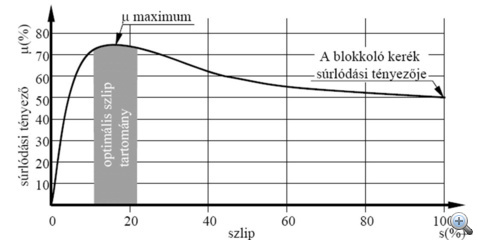
A mérések alapján 10–15 százalékos csúszás (szlip) mellett maximális a tapadási erő. Nem igaz tehát a közkeletű vélekedés sem, hogy határhelyzetben a tapadás hirtelen, minden előzmény nélkül tűnik el: a görbe jóindulatú, emelkedő ágán stabil a rendszer akkor is, ha kicsit csúszik a kerék. Ez pedig pont elég lehet egy jól átgondolt vezetéstámogató rendszernek arra, hogy az előtt jelezzen, mielőtt a sofőr elveszti az uralmát a jármű felett.
A csúszáshatár felismerésének másik módszere a kormányerő figyelése. Az elektromos rásegítésű szervóknál ez szinte gyerekjáték: mindössze a sebességfüggő határértékeket kell pontosan belőni, amelynél kisebb kormányerőnél a rendszer jeges útra vagy aquaplaningre gyanakszik.
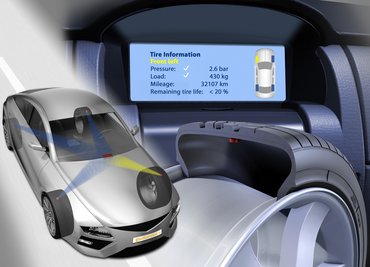
A vízenfutás felismerését további szenzorokkal is támogathatják, így például a kerékben elhelyezett érzékelőkkel a gumi deformációjának változásából következtethet a rendszer az aquaplaningre.
Végeredményben tucatnyi, jórészt már amúgy is meglevő szenzor jelének intelligens feldolgozásával előállítható olyan vezetéstámogató rendszer, ami az aktuális járműdinamika és az útviszonyok figyelembevételével megbízhatóan, időben jelzi a sofőrnek, ha a kerekek igénybevétele a tapadási határhoz közelít. Egy, az EU által támogatott kutatási projekt keretében a Continental által felépített kísérleti autóban mindez már ma is működik, és tulajdonképpen csak szoftver kérdése, hogy a közeljövőben szériaautókban lássuk viszont.
Egyetért? Vitatkozna vele? Véleményét elmondaná másoknak is?
Tegye meg a publikáció blogposztján!


További cikkeink









