Segítség, busz van az autómban
Nem is olyan régen még csak azért volt kábelköteg az autóban, hogy világítson, dudáljon, és kurblizás nélkül beinduljon. Benzineseknél esetleg még a gyújtószikrához volt pár drót. Ma viszont már gagyinak számít, ha a sebességfüggően beállított hangerőt nem veszi le a rádió, amikor beszélni szeretnénk a Bluetooth-os kihangosítóval. Ahhoz, hogy az ABS és a motorvezérlő elektronika megbízható működése mellett a fedélzeti számítógép is tizedre pontos fogyasztási adatokkal szolgálja ki a sofőrt, komoly információáramlásra van szükség. Erre való a CAN-busz.
Egy 7-es BMW szintű autóban akár kilencven vezérlőegység is lehet. Ebből egy a motorvezérlő, egy az ABS, de külön dobozkája van a műszeregységnek, a klímának, még a vezetőajtónak is. Ezeket, meg persze a tucatnyi gombocskát, érzékelőt, hangulatvilágítást több kilométer kábel köti össze – egy 2007-es Audi Q7-esben konkrétan hat. Gondoljunk csak bele, kilencven számítógép, olyasmi számítási teljesítménnyel, amit az asztali gépünk tudott pár évvel ezelőtt, egy Margitszigetet körbeérő kábelből font hálózatban. Bent, az autóban. Csodálkozunk, hogy néha meghülyül?
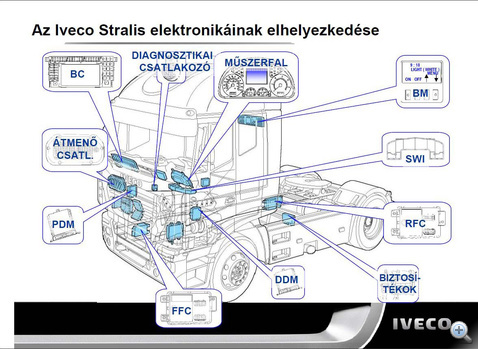
Persze a luxusautó mindig extrém példa, egy Chevy Sparkban nyilván ennek csak töredéke található, de ez még mindig sokszorosát tudja annak az elektronikának, amivel az Apollo-11 holdra szállt. Viszont a felépítése minden mai autónak hasonló, CAN-busz működik gyakorlatilag minden új autóban, nagyobb motorkerékpárban, de még a Stralis nyerges vontatóban is, amit kicsit közelebbről mutattak meg nekünk a budaörsi Iveco szervizben.

Harminc évvel ezelőtt, amikor az Intel segítségével elkezdték fejleszteni a CAN-busz technológiát a Boschnál, persze még az volt a cél, hogy kevesebb dróttal, megbízhatóbban lehessen elosztani az információt az autóban. Valószínűleg nem gondolták, hogy a helyzet ennyire eldurvul a következő évtizedekben. Hogy a kábelrengeteg elleni küzdelmük dacára a modern, kétvezetékes soros kommunikációval majd még több kábelt fognak behúzni, mint amitől annyira szörnyülködtek.
A nyolcvanas években jutott el az autók fejlődése arra a pontra, hogy nemcsak a motort vezérelte egy kis dobozka, amelybe harminc-negyven vezetékből álló, hüvelykujj vastagságú kábelköteg futott be, hanem hasonló modul gondoskodott arról, hogy a kerekek ne csússzanak meg fékezéskor, esetleg az automata váltónak is volt már vezérlőegysége.

Ebben a korszakban ezek között szó szerint több szálon működött a kommunikáció. Az autó haladási sebességét például a három felsorolt egységnek mind tudnia kellett, ezért behúztak egy-egy jelvezetéket a három modulhoz, amelyek lehettek például a kesztyűtartóban, a hátsó ülés alatt és a motortérben. Ugyanígy kellett egy drót a fordulatszámnak, a gázpedálállásnak, a motorhőmérsékletnek, és még néhány paraméternek. Az alrendszerek szaporodtak, jöttek a légzsákmodulok, digitklímák és hasonlók, a kábelrengeteg pedig kezdett kezelhetetlenné válni. Minden csatlakozó potenciális kontakthiba, minden vezeték bezárlatosodhat, és ha egy autó szűk tíz négyzetméterén több mint ezer sokpólusú csatlakozó van, el tudjuk képzelni, mennyire megbízható az egy jel – egy drót rendszer. Autóvillamosságisok rémálmai a nyolcvanas évek végi, kilencvenes évek eleji gengszterlimuzinok - nem kérdés, hogy szükség volt az egyszerűsítésre.

Talán pont az E32 leánykori néven futó 7-es BMW volt az 1986-ban, amelyikben először megjelent a CAN-busz. Az autó különböző vezérlőegységeit, amiből már tucatnyi volt akkor is, húsz-harminc jelvezeték helyett két összesodort dróttal kötötték össze, amelyen viszont sokkal intenzívebb eszmecsere zajlott. Ha mondjuk az autó harminccal ment, azt eddig egy rézdróton a feszültség másodpercenként harmincszori ki- és bekapcsolása mutatta. A két összesodort vezetéken viszont egyetlen ezredmásodperc alatt lemorzézza a motorvezérlő ötven-száz koppantással, hogy harminccal megyünk, majd esetleg még bemondja a motorhőmérsékletet és a fordulatszámot is. A többi egység pedig figyel: ha kell neki az infó, köszöni, megkapja, vagy egyszerűen elereszti a füle mellett. Majd ha neki van közölnivalója, szót kér, és elmondja a magáét, fontossági sorrendben.
Kétféle típusú üzenet létezik a hálózaton: címzett, point to point, illetve broadcast, vagyis mindenkinek szóló információ. Mint egy konferenciabeszélgetésen: Petikém, te drága menetstabilizáló egység, figyelj kicsit, Dénes vagyok, a motorvezérlő. Fontos közölnivalóm van, rövid lesz. Mondom a leadott motornyomatékot. Százhatvan newtonméter. A számjegyek összege hét. Esetleg: Mindenki idehallgasson, én beszélek most, Géza, a klímavezérlő. Harmadrangú infó, rövid: a majom bekapcsolta a légkondit. Mondom be. Vége.

Persze viccelődés nincs, minden adatnak megvan a maga helye az üzeneten belül, a résztvevők pedig prioritás szerint jutnak szóhoz. Az adatátviteli sebesség az Iveco esetében 62,5 és 250 kbit/sec között mozog, ami azt jelenti, hogy nagyságrendileg ezer-kétezer információt lehet másodpercenként közölni, mivel egy üzenet száz-kétszáz bitből áll, vagyis ennyiszer kapcsolódik a feszültség be vagy ki, amíg bemondja Dénes a nyomatékot. Nem olyan vészesen sok ez, de a Stralis nyerges vontatónak például éppen elég: a diagnosztika során láttuk, hogy a hálózat leterheltsége nagyjából harminc százalékos, ami bőven megbízható adatcserét tesz lehetővé. Ha egy perc alatt húsz másodpercnyi információt kell közölni, közbe lehet szólni egyszer-kétszer, és még nem lesz hangzavar.

Ez volna a Controller Area Network, amit magyarra általában területi irányító hálózatnak szoktak fordítani. A buszt meg kicsit erőltetetten úgy lehetne magyarázni, hogy megy a körjárat, az egyes vezérlőegységek pedig a megállók, ahol vagy felszáll egy információcsomag, vagy nem. Több ilyen járat is van persze egy fejlettebb járműben, gyorsabbak és lassabbak, attól függően, hogy mekkora az adatmennyiség. Egy-egy busz viszont mindössze két vezetékből áll, összesodorva, mert úgy kevésbé érzékeny a zavarokra.
Elmúlt akkor a lidérces rémálom, betonbiztos lett az autók elektromos hálózata? Sajnos nem ezt mutatja a tapasztalat. Ha a kilencvenes évek eleji szinten maradt volna a rendszerek összetettsége, pár évvel a váltás után valószínűleg kiforrottá, megbízhatóvá vált volna a technológia, és elégedetten dőlhettek volna hátra mind a fejlesztők, mind a tulajdonosok. Viszont ahogy az informatikában is a hardveres lehetőségeknél gyorsabban nőnek a szoftverigények, az autók fejlődése is olyan irányba fordult, aminek a mai kilencven vezérlőegység az eredménye.

Ezek pedig ma már nem csak CAN-buszon beszélgetnek, hanem jött a LIN, a FlexRay és a MOST, amit kifejezetten a szórakoztató, multimédiás alkalmazásokhoz fejlesztettek, hiszen ma már az adja el az autót, hogy mennyire könnyű párosítani a telefont, és milyen részletgazdag a navigáció. Minden gyártónak megvan a maga preferenciája, az egyetlen közös pont a kötelező OBD-II, a diagnosztikai interfész.
Már a CAN is elavult?
A kilencvenes évek végére annyira megtetszett az autógyártóknak a buszozás, hogy a CAN mellé más szabványokat is bevezettek.
Elsőként a LIN (Local Interconnect Network) jelent meg az ezredforduló környékén. Ez egy relatív lassú, max 19,2 kbit sebességű helyi busz, amely egy master és legfeljebb tizenhat slave egységből állhat. Jellemzően ajtómoduloknál, elektromos üléseknél, klímavezérlőknél használják, mindössze azért, mert olcsóbb, mint a CAN.
A MOST (Media Oriented Systems Transport) egy audio és video streamelésére alkalmas hálózat, általában optikai szálon vezetik. 150 Mbit/s sebességre képes, plug and play rendszerű. 2001-ben jelent meg először - micsoda véletlen - a 7-es BMW-ben.
FlexRay-nek hívják a legújabb szabványt, amelynek szintén a bajorok az úttörői. Ezt a 2006-os X5-ösben alkalmazták először, amelyben az adaptív lengéscsillapítókhoz kellett ez az idővezérelt busz. Később, a 2008-as 7-esben már teljes hálózatot szőttek belőle. Maximális sebessége 20 Mbit/s.
Ma már nem elég a multiméter, a laptop a minimum az autóelektromossági műhelyben. Aki ért hozzá, nem átkozza, kifejezetten szereti az 1996 utáni fedélzeti diagnosztikát. Ugyanúgy a tapasztalat választja el a jó szakit az amatőrtől, mint húsz évvel ezelőtt, csak ma nem azt kell tudni, hogy a dadogó BMW-knél a szikraoltó kondenzátor fáradt, hanem az elégtelen égés hibakódból kell rájönni, hogy zárlatos a gyújtásmodul.
Ha pedig az őrjítő, rapszodikus elektronikai hibák felelősét keressük, nem biztos, hogy a buszrendszer a ludas. Nem csak papíron, gyakorlatban is strapabíróbb egy minőségi elemekből felépített CAN-hálózat. Hiszen jó minőségű kéteres kábel van körbevezetve az autóban, kevesebb a csatlakozó és az üzenetek tartalma ellenőrzött. Inkább a szabványosításból adódó sokbeszállítós árverseny és a szoftverfejlesztési problémák okozták az a mélypontot, hogy 2004-ben a német ADAC statisztikája szerint a lerobbant felső kategóriás autók negyven százaléka elektronikai gondok miatt állt meg.
Mára elvileg javult a helyzet a minőség tekintetében, viszont annyival bonyolultabb lett egy komolyabb autó, hogy megint kilométernyi kábelrengeteget, harminc-negyven kiló rezet kell belepakolni vezeték formájában. Ennek pedig nem más az oka, mint a gyártók által feltérképezett vásárlói igények. Persze, egy Euro 5-ös motornak is bonyolultabb vezérlés kell, de a sávelhagyás-figyelmeztető, a radaros tempomat, a hőkamera és társai miatt lett megint olyan káosz az elektronikában, ami aztán keservesen diagnosztizálható, többszöri szervizlátogatással is csak szerencsével javítható hibákat produkál.


