


Akkoriban félmillióba került egy villanymotorral szerelt, brutálisan gyors gördeszka. Eldöntöttem, hogy építek egy erősebbet, nagyobb hatótávval, olcsóbban. Párszor majdnem meghaltam vele, de aztán összeállt.

Az ötlet nem tőlem jött. Ha mégis én találtam volna ki, akkor sem hiszem, hogy milliomos lennék belőle, de meglepő módon van olyan kalifornia startup, ami ezzel futott be. 2012 szeptemberétől egyhónapos Kickstarter kampánnyal összekapartak félmillió dollárt, aztán sok évig uralták a piacot. Ennek fényében ők diktálták a minőségi elektromos longboard árakat. Félmillió, forintban, egy használható hatótávval rendelkező elektromos gördeszkáért. A bennem rejlő mérnök gyorsan lenyomta a realitásba kapaszkodó nyeszlett kis neuronjaimat, és eldöntöttem, megcsinálom én magamnak. Gyorsabbra, nagyobb hatótávval, karbonabbra és ami a legfontosabb, olcsóbban.

Elektromos jármű rég adott ilyen élményt
Minőségi, gyors, ráadásul elég jó a hatótávja. De nem való mindenkinek.
Sok területen szűzként vágtam bele ebbe a projektembe. Gördeszkázni sosem tanultam meg rendesen. Mindig is próbáltam, de szerintem hiányzott belőlem a tehetség, ahhoz, hogy akár trükköket is megtanuljak vele. Közlekedni tudtam alap szinten, de semmi több. De lökni magam lábbal sosem szerettem. Ez már elég motiváció a motorizációhoz. Elektronikai tudás sem sok volt a tarsolyomban. A szénszálas műanyagok készítésében alapismereteim voltak csak. CNC megmunkálás terén pedig az alapok voltak meg, de talán mind közül az volt a legbiztosabb tudás.
De lássuk mire volt szükség, hogy delejből propulziót csináljak.
- Longboard lap, felfüggesztés, kerekek
- Motor, fogazott szíjas hajtáslánc
- Akkumulátor és vezérlő, tokozással
- Motorvezérlő, távirányító, telemetria, ezek is tokozásban
- Töltő
Kell egy penge gördeszka lap. Feltétlen olyanra hajtottam, ami nagyon flexibilis. Szuzukában, ahol akkoriban laktam, ott is szarok az utak. A bicajsávot hírből sem ismerik, még a magyar sztenderd alapján sárga festékkel készítettet sem. Járda csak elvétve akad, nagyon sok helyen a gyalogos is az úttestet kell használja. Olyan alap kellett az építéshez, ami a mostoha körülmények között is helyt áll. Komfort és biztonság szempontjából a bambusz lap volt a legjobb döntés.

A majd 1 méter hosszú lap a közepén szemrebbenés nélkül rugózott 45mm-t. Ezt úgy igazoltam, hogy a 90 mm átmérőjű kerékkel szerelt lapra álló helyzetben ráugorva simán talajt fogott a deszka közepe. Statikus terhelés alatt persze nem hajlott kiflibe. Ez az, ami nekem kell. Minőségi Loaded lapot vettem használtan, de kivártam, míg szembejött az én testsúlyomhoz ajánlott Flex 1 darab. Ez volt legkönnyebb versenyzők számára ajánlott, ha jól emlékszem, Flex 4-ig vannak lapjaik, ami a 100 kg feletti embertársaimnak is megfelel. Fejben meg is volt, hogy fogom meggyalázni marófejjel.
A tervem az volt, hogy az akkumulátor és a motor vezérlő tokozása két külön dobozban lesz, így a deszka közepe továbbra is vígan rugózhat. A két doboz között futó kábeleket mindenképpen el akartam rejteni, így a deszka gerincén martam nekik egy hornyot. Megadtam a módját. Gyakorlásnak pont jó volt, mint CNC marós feladat. A deszkát felfogtam a maróba, letapintottam a lap íveit. Hosszában felfelé ívelő „camber” profilja van, keresztben pedig nagyon enyhe U-profil. Az előbbi a rugalmasságot hivatott szolgálni, az utóbbi a jobb irányíthatóságot. Miután digitalizáltam, programoztam rá egy nagyon alap kódot a hornyok marásához. Fával dolgozni sosem tartozott a kedvenceim közé. Egyszerű okból, ha elbaszod, nem tudod visszahegeszteni. A megoldás: nem kell elbaszni.

A kerekek és a függők kiválasztásánál a legfontosabb szempont számomra az volt, hogy könnyen rögzíthető legyen rajta a motor és a szíjhatás elemei. Ezek ugyanis egy az egyben az egyik felfüggesztésen kaptak helyet. A kerekeknél fontos volt figyelni arra, hogy bár a kisebb átmérőjű kerékkel, alacsonyabb lehetne a deszka, ergó stabilabb, de veszítenék a szabadmagasságból, illetve a keréken rögzített szíjkerék maximális átmérője is ettől függ. A számolt, kipróbált, elrontott, újraszámolt és sok pénz elköltésén kitapasztalt méret a 85mm minimum átmérő. Ha jól emlékszem a számokra, 36 fogas HTD-5M szíjkereket használtam a keréken, és 14 vagy 15 fogasat a motoron. A szíjfeszesség állításról a motoroldalon volt lehetőség, 4 motor csavar, furatok helyett hornyokban csúsztatható volt.

A motor az Enertion Skateboards-tól szereztem be. 3 kW. Eszement, teljesen felesleges teljesítmény, de nem volt viszonyítási alapom, gondoltam, ha a konkurencia 2 kW-tal gurít, jobb, ha az én deszkám is odébb bír majd állni. A modellezőknek ismerős lehet. Gyakorlatilag egy felizmosított BLDC Outrunner motor. Ez a kefe nélküli külső forgórészes motor rövidítése. Kicsit drágább volt, mint a sima modellezéshez használt hasonló motorok. Ezt azzal indokolták, hogy a csapágyazása erősebb, a kihajtó tengelye vastagabb és reteszhornyolt volt, nagyobb radiális terhelést viselt el, ami a szíjfeszítésből adódott a használat során.


A szíjfeszítésre illett figyelmet fordítani, mert nem csak a gyorsításhoz szükséges nyomatékot vitte át a picinyke szíj, de a fékezésért is teljes mértékben az volt a felelős. Viszont ez volt az egyetlen kopó-fogyó dolog a hajtásláncban, és ez is határozottan jól bírta. Két év alatt három szíj fogyott el. Standard alkatrész révén filléres tétel, csak ne 40 km/h-nál mondja, hogy csere van. Azt hiszem, az első szíjszakadásom után 3D nyomtattam rá egy kis műanyag védőborítást. A legnagyobb ellenfele ugyanis a fogak és a szíj közé beszoruló kis kavicsok voltak. A motor nem kérdezett, bedarált mindent, és utólag megvizsgálva, szinte biztos voltam, hogy mindig ez volt az oka a szakadásnak.
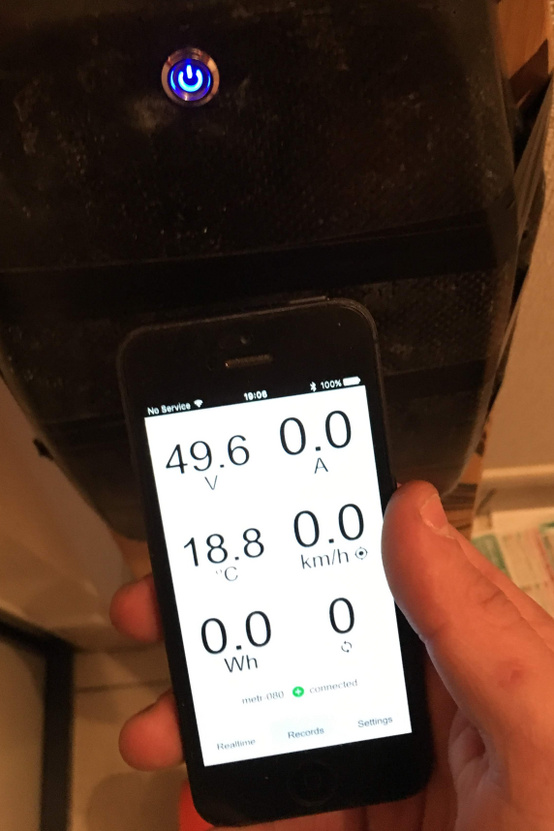
Energiatárolásra lithium polimer akksikat használtam. Ma már nem ezzel csinálnám, mert a tasakos kis cellák az Antikrisztus megtestesülései is lehetnének. Lehetnének, de én sosem jártam velük pórul. Amit megtanultam még a gördeszkám tesztidőszakában, hogy nincs értelme ennyi cellával vezérlő nélkül kísérletezni. A különböző belső ellenállású cellák, úgyis mindig eltérő módon merülnek. Márpedig, ha túlmerülnek, az halált jelent nekik. Enyhe felpúposodással jelzik, hogy ez most fárasztó volt, és onnantól kezdve csak saját felelősségre nyüstölje őket bárki. Ebből születnek azok a Youtube videók, amik rossz hírét keltik ezeknek az akksiknak. Nekem 48-50 Volt közötti feltöltött rendszerfeszültségre volt szükségem. Ez 12 cella sorbakötésével értem el. 5000 mAh cellákkal számolva, gyors fejszámolással 250 Wattóra volt a tarsolyomban. Balhémentes időkben 99 wattórás akksikat engedtek fel a repülőgépekre. A nagy gyártók deszkáinak ezért volt olyan gyatra hatótávja. 2,5-szörös méretű akksival már csak nem fenyeget ez, úgy éreztem. Méretre pedig nem volt egy nagy eresztés, még akkor sem, mikor a tartós 60 Amperes kimenő áramerősségű vezérlővel párosítottam az egészet.
Közben lehet megint számolni. 50 Volt szorozva 60 Amperrel, meg is volt a 3000 Watt teljesítményem. Mivel akartam ezt átvinni a talajra? 90mm átmérőjű, kb. 50mm széles, egy, azaz egy darab hajtott kerékkel. Na most kell nevetni. Szó szerint képes volt bármikor burnout-olni, nagyobb sebességnél pedig a gatyómba rajzoltatni velem. 30 km/h környékén már nem kapart, csak még mindig olyan vehemenciával indult meg, hogy többször is az életemért küzdve egyensúlyoztam. Ez így nem volt jó. Túl erős. Túlontúl nyers. Mások is lépten nyomon ki akarták próbálni, de esélyük sem volt, mert bár elmondtam, hogy nagyon erős, vállat rándítva becsmérelték. „Ugyan már, ez egy gördeszka.” Gázt adtak, lerepültek hátra, és sikítva, bocsánatkérések közepette keresték meg az elszaladt deszkát... Csak gördeszka, gondoltam magamban. Kínálgathattam nekik a bukósisakot, az első próbálkozásig senki nem akarta felvenni. Aztán önként tették a kis snowboardos bilimet a fejükre.

Bele kellett ássam magam komolyan a motorvezérlő paramétereibe. Mozgásra bírni egész könnyű volt. Egy alap motorparaméter-mérés után, amire saját maga is képes volt, már lehetett is hasítani vele. Körülbelül fél évembe telt, mire egy igazán jól használható, napi közlekedési eszközt hoztam össze belőle. Közben találtam hozzá egy bluetooth-os telemetria és programozó modult, amivel laptop nélkül, menet közben tudtam konfigolni, ha mégis sietni akartam volna. Jellemzően a maximum teljesítmény 1500 Watt-ban volt maximalizálva, mindezt olyan teljesítmény leadási görbével, ami figyelembe vette az akkumulátor aktuális töltöttségi szintjét. Először ugyanis a rádiós távirányító ravasza a nyers ráeresztett ampereket vezényelte ki. Ez azért nem volt kellemes, mert teljesen töltött akksinál veszedelmes volt, ahogy merült, úgy kezdett kezesebb lenni. Ebből lett egy olyan beállítás faragva, hogy mindentől függetlenül, adott gázállás adott teljesítményt ad vissza a talpunk alá. A fékezés beállítása hasonló kísérletezést és komfortzónakeresést igényelt. A maximális fékerő, kibillentett az egyensúlyból. Ezt tetőzte, ha nem figyeltem a szíjfeszességet, és erősebb fékezésnél, átugrott néhány fogat, darabos, himbálózó féktávokat eredményezve. Halálfélelem.


A kedvenc általam kreált vezérlési hibám a motorvezérlő és az akksivezérlő közötti egyet nem értésből fakadt. Egyenként és külön állítottam be feszültség limiteket, a túltöltés és a túlmerítés ellen egyaránt. Ami sosem tűnt fel, hogy az akksi maximum feszültség limitje a névleges limit, amit a cellákra számoltam, az fékezéskor kevésnek bizonyulhat. Történt ugyanis, hogy nem otthonról indultam valami dimbes-dombos helyről, ahol csordultig töltöttem az akksit a fékezve regenerálással. Egy darabig. Mert aztán időnként elment a fék. Nem egy pillanatra, másodpercekre. Közúti forgalomban a másodpercek, ha nem érzed magad nyeregben, fényévekkel egyenlők. A probléma az volt, hogy a fékezéskor érkező feszültség csúcsok elérték az akksivezérlőm hard limiterét. Erre volt benne egy timeout-is programozva, névlegesen 3 másodperc. Vagyis mikor beütött egy 53 Voltos pillanatnyi feszültség, olyankor 3 másodpercre az akksivezérlőm azt mondta a motorvezérlőnek, hogy ide már ne küldj több áramot, mert mind meghalunk. Mindenki lekapcsolt, egy-két-há, szívroham. Védték magukat, én meg izzadtam közben. Ennek felderítésére volt tökéletes benne az a minimális telemetria, amit tudott. Fel tudta rakni a térképre a pozíciómat, a motor által felvett és leadott teljesítményt, ezzel egyidőben az akksi adatokat is rögzítette. Némi logikázás után rájöttem, és meg is találtam a megfelelő paramétereket, hogy ilyen soha többet ne történjen. Nem volt nehéz feladat, de amikor kezdőként próbálsz mindent összefésülni, a tengernyi beállítás és beépített védelem egyszerre áldás és átok. Mindezt minimális elektronikai és programozói jártassággal. Már nem emlékszem pontosan, de onnan, hogy először szigszalagoztam akksit a deszkalapra és 3kW teljesítménnyel féktelenül majomkodtam, odáig, hogy riding mode választó volt a telefonomon és megbíztam teljesen a már megszelídített technikában, legalább 8-9 hónap telt el.
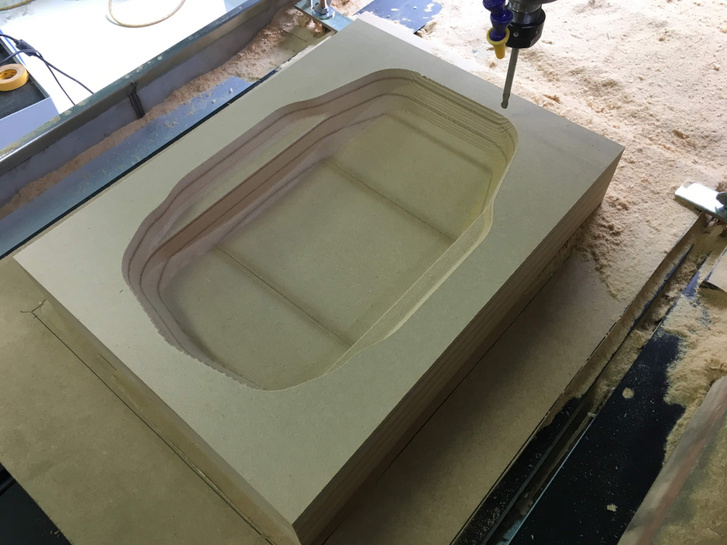
Hogyan lett ez ízlésesen tálalva a végén szalagozás nélkül? Gyakorló CNC-s elfoglaltságként csináltam két tokozást szálerősített műanyagból. Költséghatékonyságból megmaradt préselt lemezekből ragasztottam össze mindkét tokozás formájához a megfelelő vastagságú anyagot. Mivel a deszka alakja nagyjából megvolt már CAD-ben, mert visszamodelleztem, megterveztem a tokozásokat, hogy minden elférjen bennük. Ezután az inverzüket véve, csináltam belőlük szerszámpályát, és már mehetett is megmunkálás. Ekkor még nagyon kezdő voltam. Leginkább csak a lineáris szerszámpályák programozása ment stabilan. De háromtengelyes CNC routerrel szerintem így is vállalható eredmény született.
Kézi csiszolással előkészítettem őket a forma géllel való bevonásához. Mivel ezt is csak tanultam, tanácsként a kollégák azt javasolták, játszunk kicsiben. Semmi pre-preg karbon. Ahhoz ugyanis jellemzően nagy hőmérsékletű hőkezelés kell vákuum alatt a munkadarab végső szilárdságának eléréséhez. Így miden alapanyag úgy lett megválasztva, hogy kézzel visszük fel rá az epoxit, és maximum 80 Celsius fokon hőkezeljük. Közel sem ad olyan konzisztens és szép eredményt, mint a fejlettebb infúziós vagy pre-preg eljárások, de költséghatékony, és nem kell hozzá drága felszerelés.

Az első akksitokozásom félig vállalhatatlan volt. A forma meg is semmisült közben. Nem vittem fel elég leválasztót a formára, a darabom pedig szépen belekötött. Nem lett végül használhatatlan, csak csúnya és zárványos. Meg persze célszerűen nem kalapáccsal akarod leverni róla a formát. De hát mindent el kell kezdeni valahol. Az alámetszések kerülésére, meg a falferdeségre már akkor is figyeltem, de az előkészítést elkapkodtam. A második formám már sokkal jobb, talán még meg is van valahol Japánban.

Összesen több mint két évig jártam vele mindenhova. Melóba, bevásárolni, nyaralásra jött velem. Ha esett nem vettem elő, mert azért az IP rating-től messze állt, amit összehoztam. De körbegördeszkáztam vele Tokiót, alig 500 lelket számláló kis szigeteken ez volt a közlekedési eszközünk, ahol a szintén gördeszkázó tesómat is vontattam vele, így csomagokkal kb. 200 kg-t cipelt magával a kis deszka. Hatótávra simán hozta a 30 kilométert. Annyit menni vele egy nap alatt már iszonyat fárasztó volt. Elzsibbadt a lábad a rengeteg rázkódástól. A végsebességét sosem tudtam meg, egyszer mentem vele GPS szerint 42 km/h-val, és soha többet, annyira félelmetes volt. Áttétel szerint 60 körül kellett legyen a vége. Talán egyszer kiderül, mert minden darabja megvan, kivéve az akksit, mert azt hazaköltözésemkor nem hoztam el. 2-3 éve ígérem magamnak és a barátaimnak is, hogy újra összerakom, és mindenki kipróbálhatja, de még nem került sor rá. De mindennek eljön az ideje. És akkor, ami mindenkit érdekel: mennyibe lett a végén - spoiler: nem lett lényegesen olcsóbb.

Tételes listát vezettem az alkatrészekről:
| Alkatrész | Márka/megjegyzés | Ár, forintban |
| Gördeszka lap | Loaded Dervish | 57800 |
| Felfüggesztés | Caliber Trucks | 25500 |
| Kerekek | Orangotang 85 mm | 27200 |
| Griptape (smirgli a tetejére) | Tök mindegy, milyen | 1700 |
| Kötőelem (csavar es tarsai) | A felfüggesztés nem metrikus, szóval ezt külön kell venni | 3400 |
| Motorfelfogatás | Enertion | 20400 |
| Motor | Enertion R-spec 6355 190 kv | 34000 |
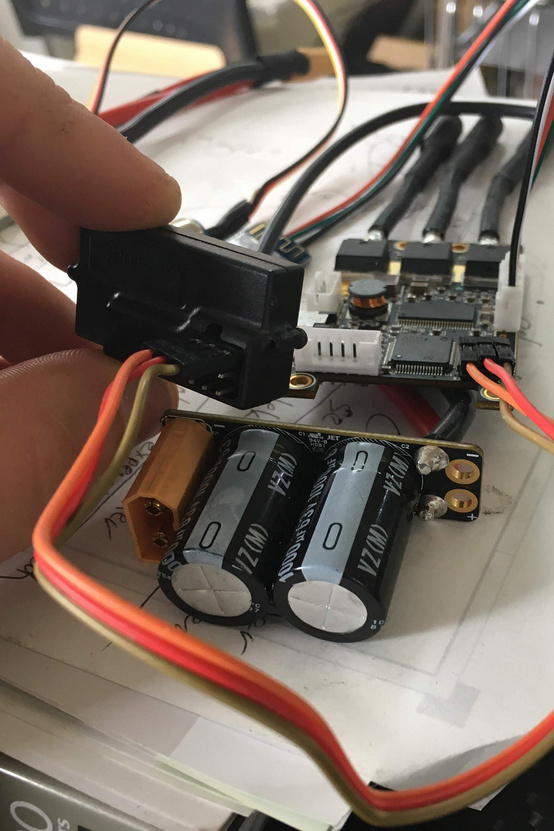
| Motorvezérlő | Enertion VESC (Vedder ESC, nem kínai) | 27200 |
| Hajtáselemek | Szíj, szíjkerekek | 17000 |
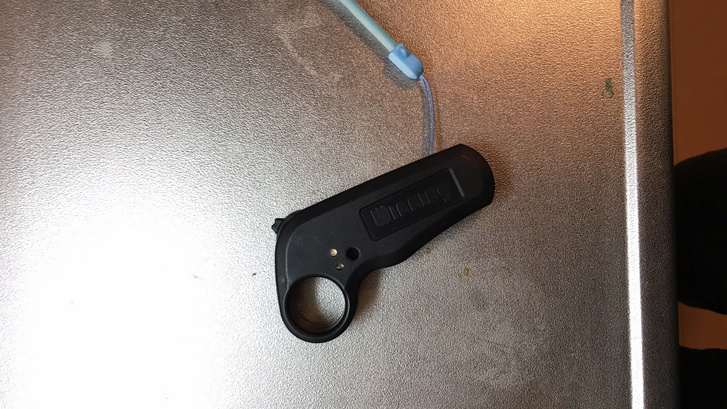
| Távirányító | Torqueboards Nano remote | 17000 |
| Bluetooth kommunikáció | Valami fórumról egyedi | 10200 |
| Akkucellák | Turnigy LiPo (12 cella) | 78200 |
| Kábelezés | Turnigy 10 AWG Silicone ujjnyi vastag kábelek plusz nagyáramú csatlakozók | 17000 |
| Töltő | Kínai 53V 3A | 5100 |
| Akkuvezérlő | Ebay-ről valami kínai, de bluetooth-os | 17000 |
| Egyedi tokozás | Ráment pár hétvégém a műhelyben | 0 |
| Postaköltségek | Japánba rendeltem mindent Kínából meg Ausztráliából | 51000 |
| Összesen: | 409700 |
Ilyen és ehhez hasonló tartalmakért kövesd a Totalcar TeChno Facebook-oldalát is!

Az oldalról ajánljuk

- Hírek
Az F1-es Szaúd-Arábiai Nagydíj legnagyobb kérdései
Minden okunk megvan azt remélni, hogy a 2025-ös futam is emlékezetesen alakul Dzsiddában.

- Hírek
Ez itt a frissített Volvo S90, de van vele egy komoly gond
Finom faceliftet kapott az S90, amiben marad a benzinmotor és megtartották az elegáns dizájnt. Beszerezni viszont nem lesz egyszerű.

- Hírek
Tragikus motorbalesetben elhunyt az első magyar Dakar-motoros, Varga Ákos
Egy figyelmetlen sofőr oszlopnak lökte. Varga Ákos 49 éves volt.

- Hírek
Beperelik a Teslát, felülmérnének az autók?
Néhány Tesla-tulajdonos szerint az autójuk a valósnál több megtett kilométert számol. Szerintük azért, hogy hamarabb lejárjon a garancia.

- Gumidoktor
Sokat megyek a kabrióval, de négyévszakos gumit szeretnék. Hülyeség?
Hóban úgyse használom, viszont elég sok kilométer pörög a kabrióba. Reális választás a négyévszakos?

- Közélet
Nem úszod meg a bíróságot!Összetört a motor, a biztosító nem fizet mindent és még a szakértő cég is hárít
Aki komolyan szeretne valamit, az kezdjen egyből a bíróságon? Kinek jó az, ha megegyezés helyett pereskedésre kerül a sor? Legfőképpen senkinek.

- Tesztek
A lázadóknak semmi esélyükBemutató: Mercedes-Benz CLA 2025
Ott voltunk a stuttgarti Csillagok háborúja budapesti premierjén.

- Olajdoktor
Csattog a belevaló olajtól a Chevrolet (helytelennel jó volt)
Eddig szépen járt olyan olajjal, ami elvileg nem is jó bele. Most előírt viszkozitásúval fut, és rossz hangja van. Mi a teendő?

- Hírek
A Porsche 911 GT3 lett a leggyorsabb manuál váltós autó a Nürburgringen
Még a facelift előtti 911 GT3 idejét is megverte, pedig abban egy szupergyors PDK automata pakolgatja a fokozatokat.

- Hírek
Valahova rohadtul sietett ez a motoros (de megszívta)
A tempója még autópályán is nagyon durva lenne. Nem ott ment.

- Hírek
Roncsautókkal seftelő európai bűnbandára csaptak le a hatóságok, Magyarország is érintett
A bűnözők amerikai roncsautókat importáltak majd adtak el törvénytelenül Európában, többek között Magyarországon is.


- Hírek
Cáfolta a Volkswagen egy új Audi R8 érkezését
Egy középmotoros, belső égésű motorral szerelt sportautó nem szerepel a terveik között.

- Technika
Autók, amikben felnőttünk III. – 1980-as évek
Sorozatunkban bemutatjuk a magyar utak legmeghatározóbb típusait, generációk álmait és rémálmait, a családok második legnagyobb értéktárgyait.


- Szerelem
Mesterségem címere: 992.2 - PORSCHE Carrera S - USA VLOG
San Diego, óceánpart, Porsche. Borsodi fenekem végre révbe ért és kipróbálhattam a világ egyik legjobb sportautóját.

- Hírek
Elektromos modelleken tér vissza a Ford ST és RS jelölése
Ugyanúgy vad és sportos modelleket jelölnek majd.

- Hírek
A Jaguar még a villanyautók korában is életben tartja a legendás E-Type-ot
A mai napig nagy számú eredeti alkatrész áll rendelkezésre a legjobb esetben is 51 éves modellhez.

- Hírek
Kombi-SUV-izé lett a Subaru Trailseeker, és megy, mint a vesztés
A Subaru bemutatta a Trailseekert, amiről még azt se könnyű megmondani, hogy milyen kategóriában játszik. Viszont rohadt gyors.

- Hírek
Az új Subaru Outback sokkal kevésbé kombi és sokkal jobban SUV, mint eddig bármikor
Aki nem elégszik meg az alap Outback terepezési képességeivel, annak elérhető a Wilderness Edition is.

- Hírek
Hol tart a Hyundai, a Kia és a többiek?
És még csak most jön az amerikai vámvihar.

- Hírek
Ultimátumot adott az ügyfeleknek a Volkswagen
A német gyártó azt ígéri, hogy a vámtarifák miatt növekvő költségek ellenére se emel árat. Legalábbis egy darabig.



- Hírek
Felborult egy kamion, lezárták az M3-as autópályát
A Budapest felé vezető oldalon az 59 és 60 kilométer között történt a baleset.

